Sim and RL
The TetherIA Aero Hand Open features a physically accurate tendon-driven actuation system that emulates real cable mechanics, allowing control and observation directly in tendon space. This design provides a faithful bridge between simulation and real-world deployment.
The hand can be simulated across multiple physics platforms. Currently, it supports the MuJoCo simulator, where it is fully integrated into MuJoCo Playground for seamless visualization, training, and evaluation of tendon-space control policies. Support for additional simulation platforms is currently in progress.
- Hand Model: MuJoCo Menagerie – TetherIA Aero Hand Open
- Training Tools: MuJoCo Playground
Quick Start
If you’d like to train your own policy, follow these steps:
- Install MuJoCo Playground following the installation guide.
- Try the built-in Z-axis rotation environment for a quick demo, or create your own custom task following this example.
- Launch training with:
python learning/train_jax_ppo.py --env_name AeroCubeRotateZAxis
You can replace AeroCubeRotateZAxis with the name of your own environment. After training, a rollout video will be saved as rollout0.mp4.
If you'd like to explore TetherIA Aero Hand Open within the MuJoCo simulator, follow these steps:
- Follow the official MuJoCo installation guide.
- The hand model is hosted under our fork of the MuJoCo Menagerie:
git clone git@github.com:google-deepmind/mujoco_menagerie.git - Navigate to the hand’s directory and open the simulation scene:
cd mujoco_menagerie/tetheria_aero_hand_open
simulate scene_right.xml
Main features include:
- Physically consistent tendon routing and pulley mechanics.
- Full tendon-space control and observation interface.
- JAX-based PPO training integrated with MuJoCo Playground.
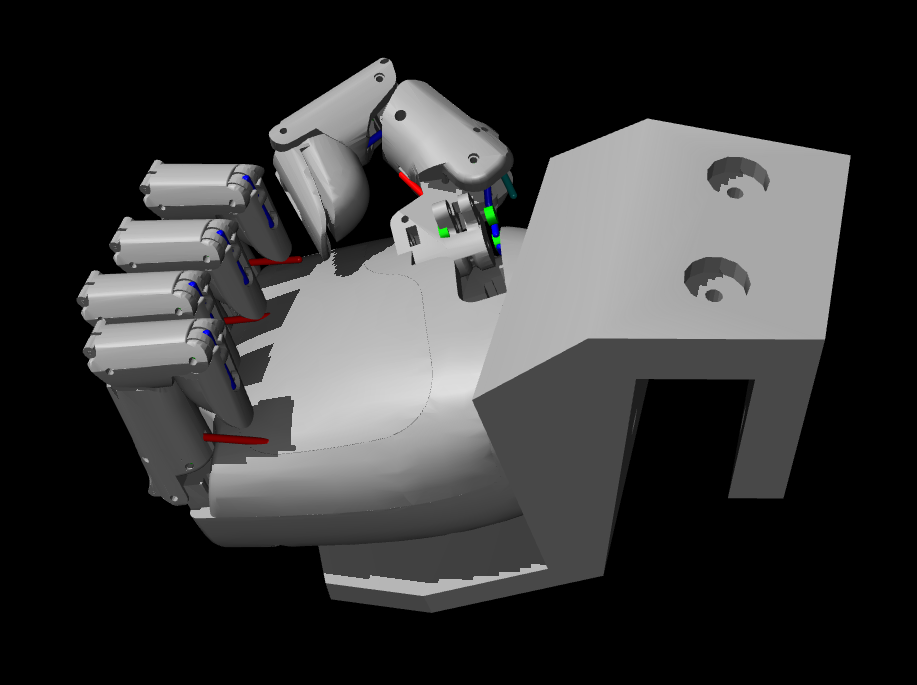
An overview of the hand is shown below:
 |  |  |
|---|
1. TetherIA Aero Hand Model
1.1 Modeling
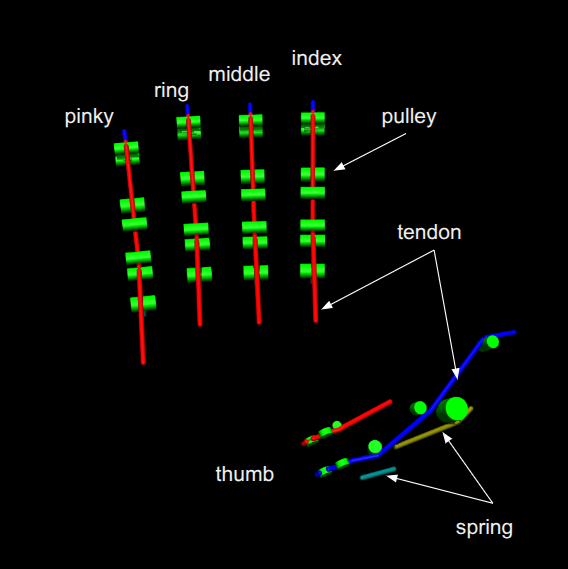
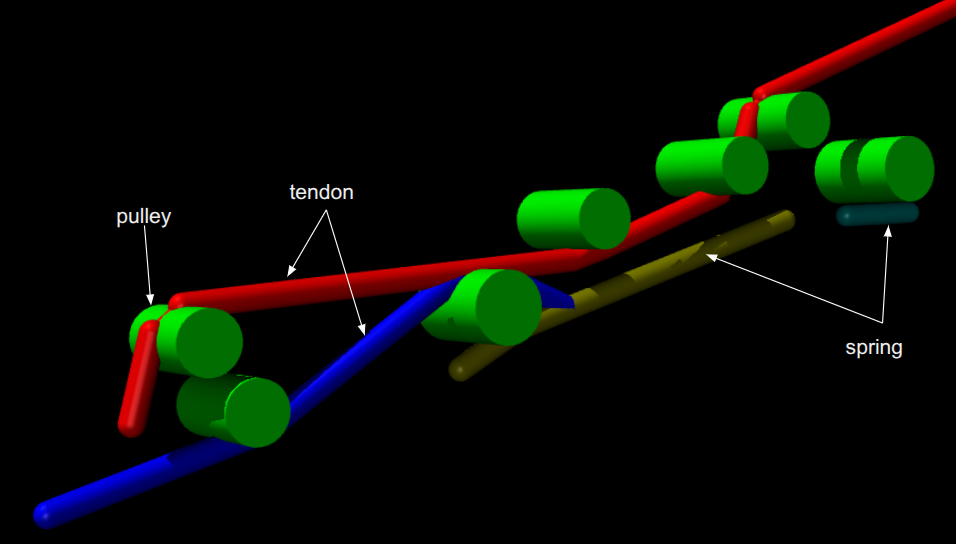
The simulation model is derived from URDF models, accurately representing the real mechanical structure. The simulation reproduces the cable actuation through three essential components:
1.1.1 Tendon Drives
Spatial tendons drive the fingers and thumb, following the same routing paths as the real hand.
1.1.2 Springs
Modeled as tendon elements, springs generate restoring forces for finger extension, mirroring the real mechanical springs.
1.1.3 Pulleys
Cylindrical pulleys guide cables and springs to ensure accurate routing and consistent actuation behavior.
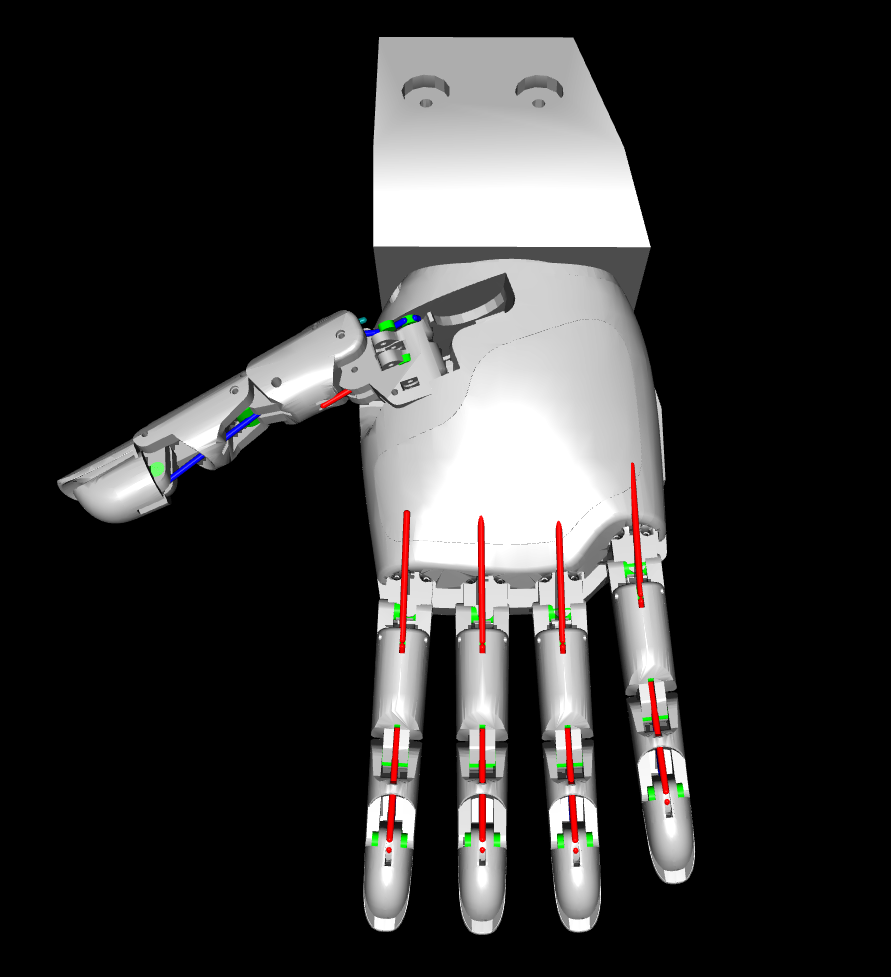
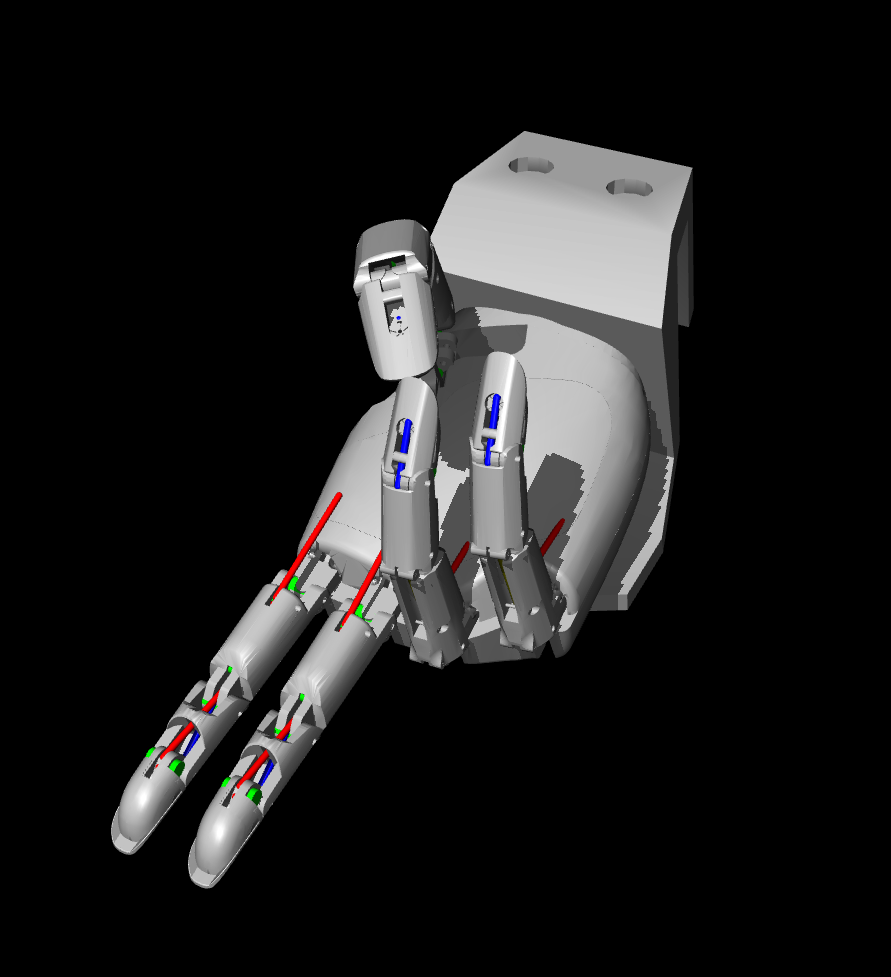
| Front view | Close-up of index |
|---|---|
 |  |
1.2 Parameters
1.2.1 Mechanical Parameters
- Joint limits, mass, and inertia: directly taken from the URDF for physical fidelity.
- Pulley placement: matches the real hand’s geometry, ensuring correct cable and spring routing.
- Validation: the simulated tendon range (0.0459454 m) closely matches the real hand (0.04553 m) without manual adjustment.
1.2.2 Tendon and Spring Specifications
- Tendon properties: identical to the real system.
- Spring properties: match hardware specifications, except for the DIP spring—adjusted slightly for more realistic motion.
1.2.3 Control Parameters
All remaining control parameters are fine-tuned to ensure consistent dynamics between simulation and hardware, including:
- Joint damping values
- Actuator gains
- Joint-specific damping coefficients.
2. Training a Tendon-Space Policy
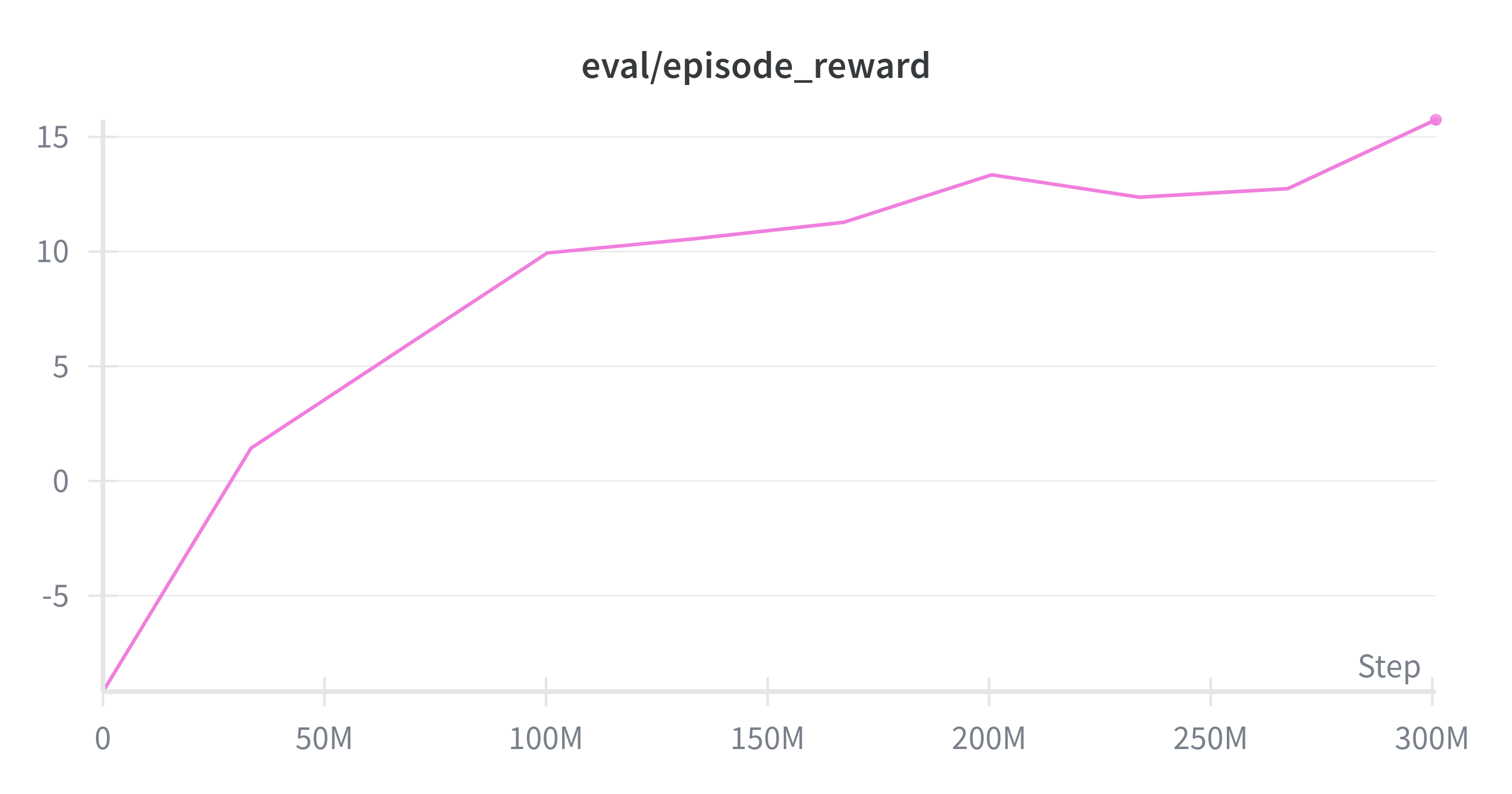
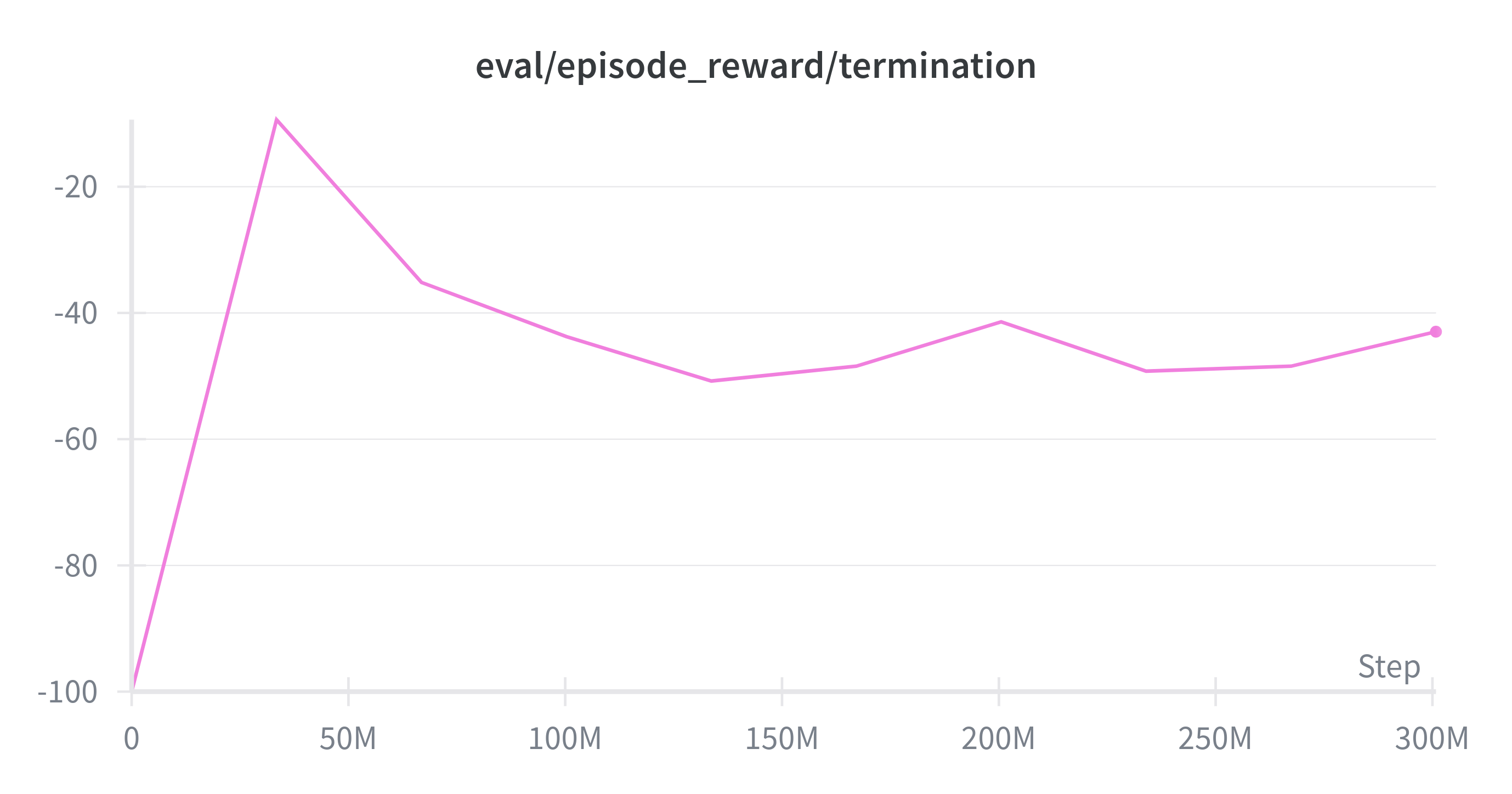
We introduce a Z-axis rotation task for the TetherIA Aero Hand Open, optimized using the following reward function:
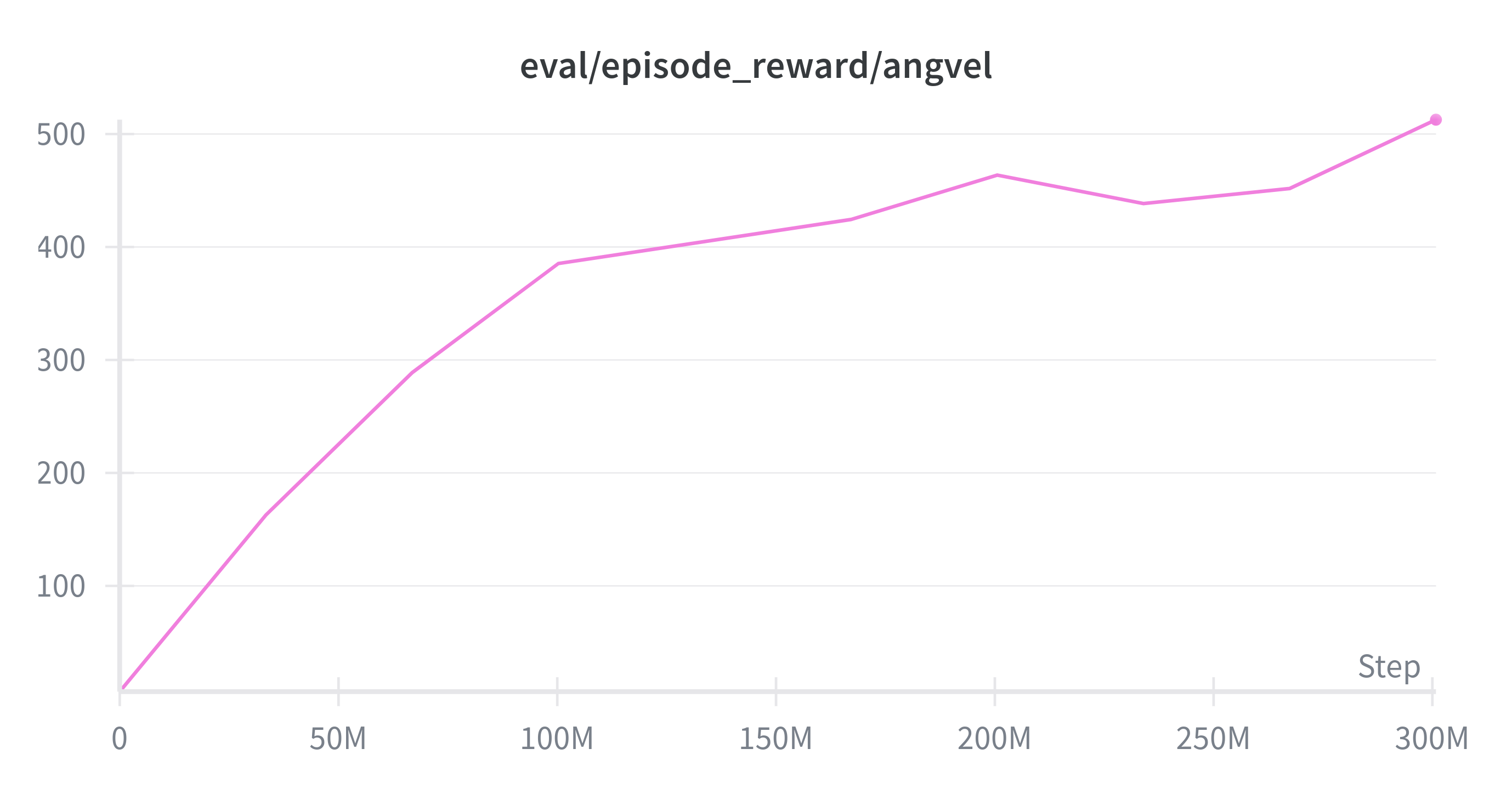
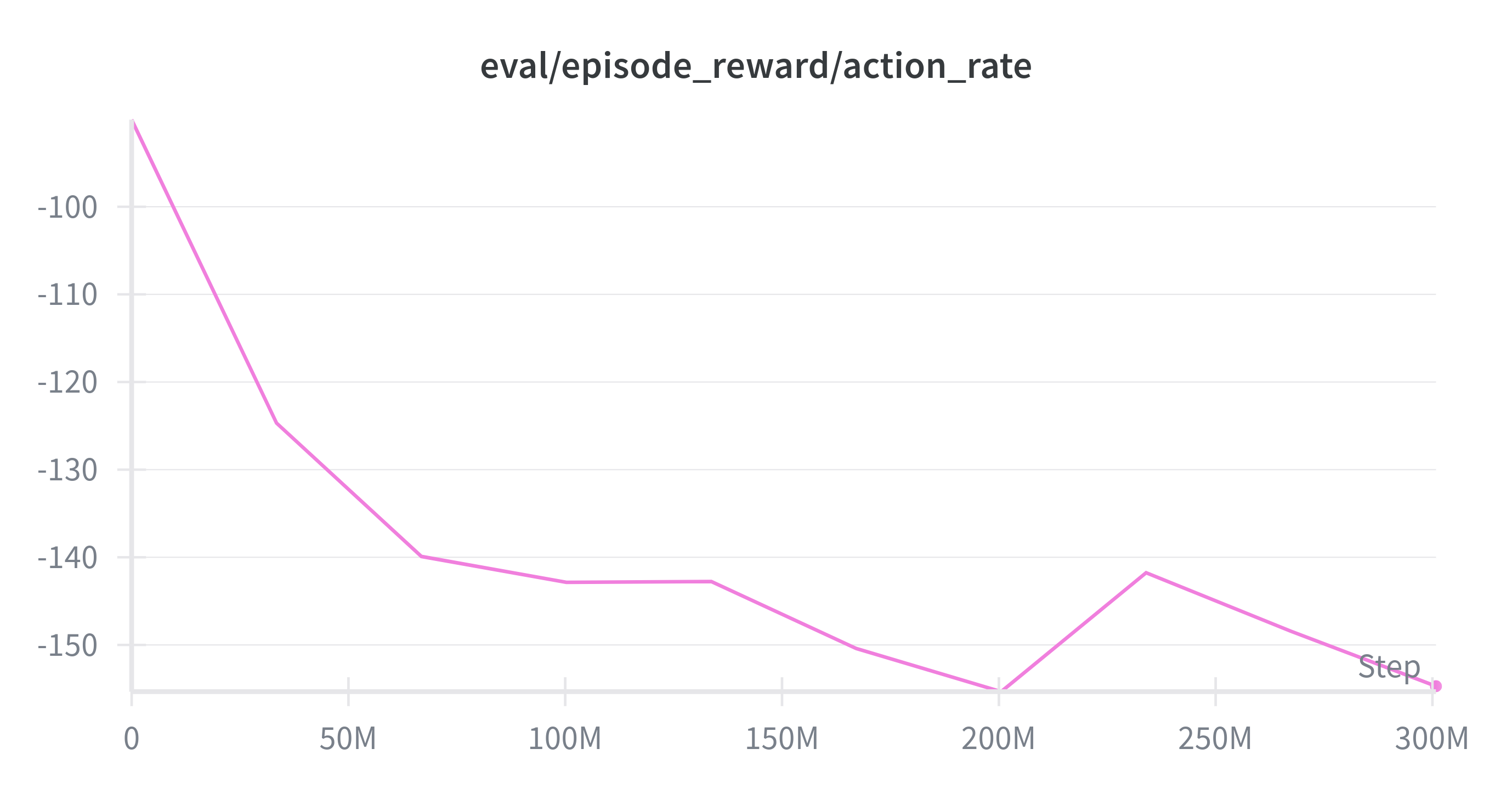
reward = 1.0 × angular velocity - 1.0 × action rate + termination (-100.0)
The optimization variables include tendon lengths and the thumb abduction joint, both corresponding to the real actuation system. This design ensures that the same control and sensing channels can be directly applied in sim-to-real deployment.
To train the policy:
python learning/train_jax_ppo.py --env_name AeroCubeRotateZAxis
While training results vary slightly due to stochasticity, runs consistently converge toward a positive total reward. Below are example reward curves obtained using PPO:
Overall Reward
Angular Velocity Reward
Action-Rate Penalty
Termination Penalty
3. Running a Pretrained Policy
This example builds upon MuJoCo Playground as an educational platform. We are actively working to merge our implementation into the official repository. This has been officially merged into MuJoCo Playground in commit 1bd244f.
To test a trained policy:
python learning/train_jax_ppo.py
--env_name AeroCubeRotateZAxis
--play_only
--load_checkpoint_path path/to/checkpoints
This will:
- Load the trained PPO policy
- Run rollouts in simulation
- Visualize the manipulation behavior
| Seed 0 | Seed 1 | Seed 14 |
|---|---|---|
 |  |  |
Sim-to-Real Deployment on the TetherIA Aero Hand Open
Note: The finger markers are for visualization only and are not used for control.
Acknowledgements
Dependency:
Made with ❤️ by TetherIA Robotics