Aero Hand Open
Aero Hand Open
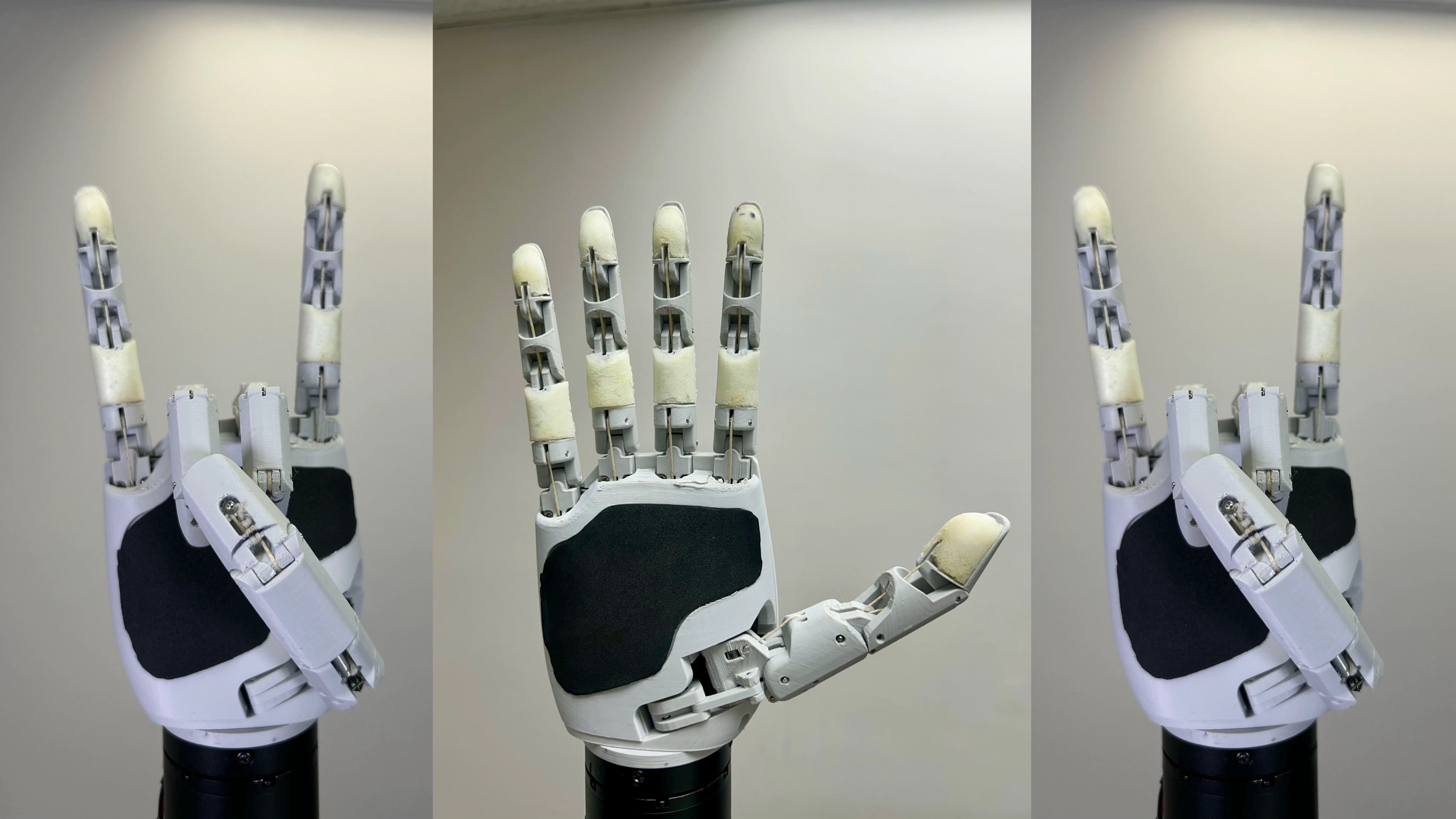
Aero Hand Open is a tendon-driven, under-actuated dexterous robotic hand built for research in manipulation, reinforcement learning, and embodied AI.
It is designed for reproducibility, transparency, and ease of integration across hardware, firmware, and software layers.
Hardware Overview
The hand adopts a tendon-driven actuation architecture, where each motor drives multiple joints through cable routing.
This approach achieves high dexterity with fewer actuators, resulting in a lightweight and compliant design.
Key characteristics:
- 16 Degrees of Freedom (7 active, 9 passive)
- 3 active DoFs for the thumb, enabling real dexterity
- One-motor-per-finger tendon actuation
- Passive 1:1 coupling between DIP and PIP joints
- Adaptive coupling at MCP joint for compliant contact behavior
- Compact servo actuator modules with integrated encoders
- Modular 3D-printable mechanical components
- 6 V DC power input and USB communication
- Fully open-source CAD and PCB design
All mechanical and electrical design files are available in the hardware folder.
Firmware and Control
The onboard controller runs custom firmware supporting:
- Position, velocity, and torque control modes
- High-frequency communication over USB
- Real-time command streaming via Python SDK
- Built-in calibration and diagnostics utilities
Firmware source code is hosted in the firmware folder.
SDK and ROS 2 Integration
Developers can interface with the hand through:
- A Python SDK for joint, tendon, and sensor interfaces
- ROS 2 packages exposing communication, teleoperation, and and RL policy deployment, etc.
- Example nodes for control, data collection, and policy playback
Software API is maintained in the sdk folder.
ROS2 packages is maintained in the ros2 folder.
Simulation and Learning
Aero Hand Open is fully supported in MuJoCo with upcoming Issac Sim support, with tendon-level actuation and observation.
It integrates with popular RL and imitation learning frameworks, including MuJoCo Playground and LeRobot (coming soon), enabling a consistent sim-to-real workflow.
Use simulation to train control policies, benchmark algorithms, and prototype manipulation tasks before deployment on real hardware.
Repository Structure
| Component | Repository | Description |
|---|---|---|
| Monorepo | aero-hand-open | Consolidated repository for community contributions |
| Hardware | hardware folder | CAD models, assembly, and PCB design |
| Firmware | firmware folder | Embedded control software |
| SDK / GUI | sdk folder | Python SDK and GUI |
| ROS2 | ros2 folder | ROS2 packages for URDF, TeleOp, RL policy deployment, etc. |
Getting Started
- Quick Start
- Control & Integration
- Deep Dive
License
All components of Aero Hand Open are released under permissive open-source licenses.
Please refer to the LICENSE FILE for license details.
Made with ❤️ by TetherIA Robotics