Mechanical Overview
Aero Hand Open is a compact, anthropomorphic five‑finger robotic hand designed to be easy to mount, wire, and control.
1. Form Factor & Appearance
Overall size & weight
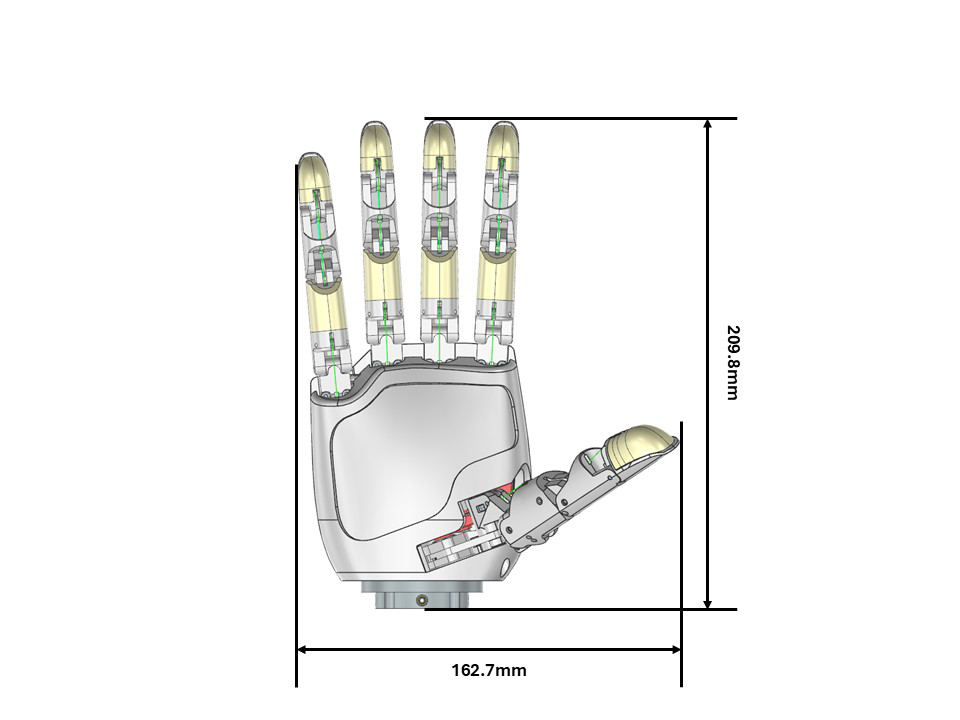
- Size (L × W × H): 198 mm × 95 mm × 53.5 mm
- Mass: < 400 g (fully assembled)
- Layout: 4 fingers + 1 thumb, human‑like proportions
The hand has a slim back‑of‑hand profile and a gently curved palm so it can work close to cameras, tools, and robot wrists without bulky back‑mounted motors.
Exterior materials
- Body & fingers: 3D‑printed PLA shell
- Contact surfaces: optional silicone pads for the fingertips and palm to increase grip and impact protection
The external geometry is identical across kits; printing or color variations only affect appearance, not the interface.
Left / right variants
Aero Hand Open is available as:
- Right hand
- Left hand (mirrored geometry)
Both versions share the same mechanical specs and control API.
Additional views
2. Key Mechanical Specs
| Item | Value / Description |
|---|---|
| Size (L × W × H) | 198 × 95 × 53.5 mm |
| Mass | < 400 g |
| Structure | Anthropomorphic, 5‑finger hand |
| Joints | 16 joints total |
| Active DoF | 7 active DoF (3 thumb, 4 fingers) |
| Passive joints | 9 (underactuated finger/thumb mechanics) |
| Fingertip force | ≈ 12 N per fingertip |
| Open/close speed | ≈ 1.2 Hz full open + full close |
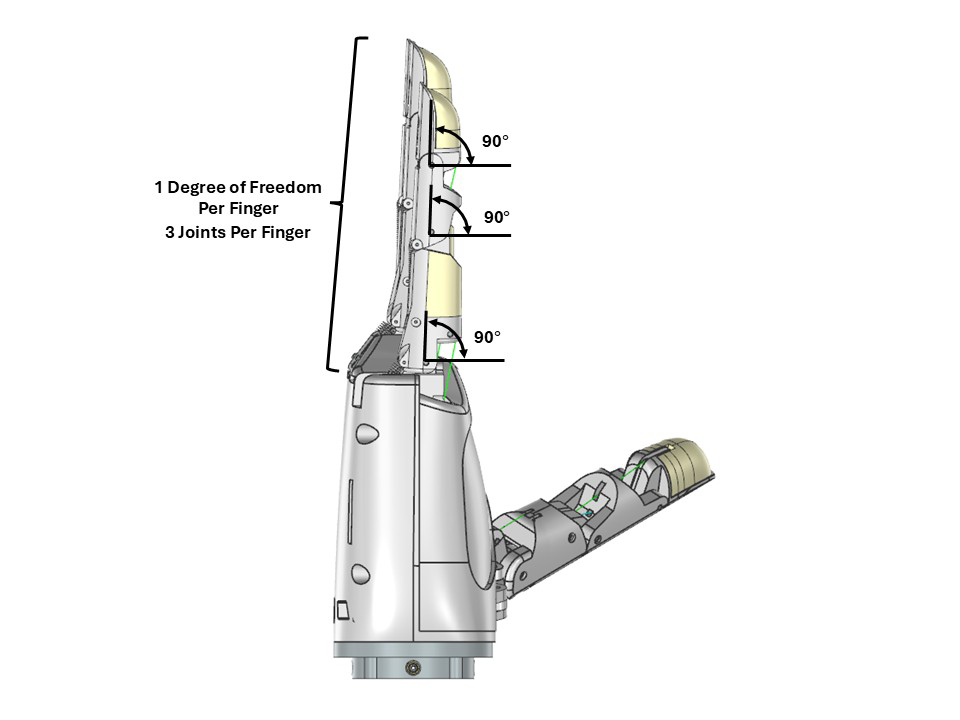
| Finger joint ROM | Up to 90° flexion per finger |
| Thumb abduction ROM | 0°–100° |
| Thumb CMC flex ROM | ≈ 55° |
| Thumb proximal/distal | ≈ 90° combined flexion |
| Working voltage | 6 V DC (servo rail) |
| Max current | 8 A (entire hand) |
| Communication | USB 2.0 via on‑board ESP32‑S3 |
3. Degrees of Freedom
DoF breakdown
From the outside, the hand provides:
-
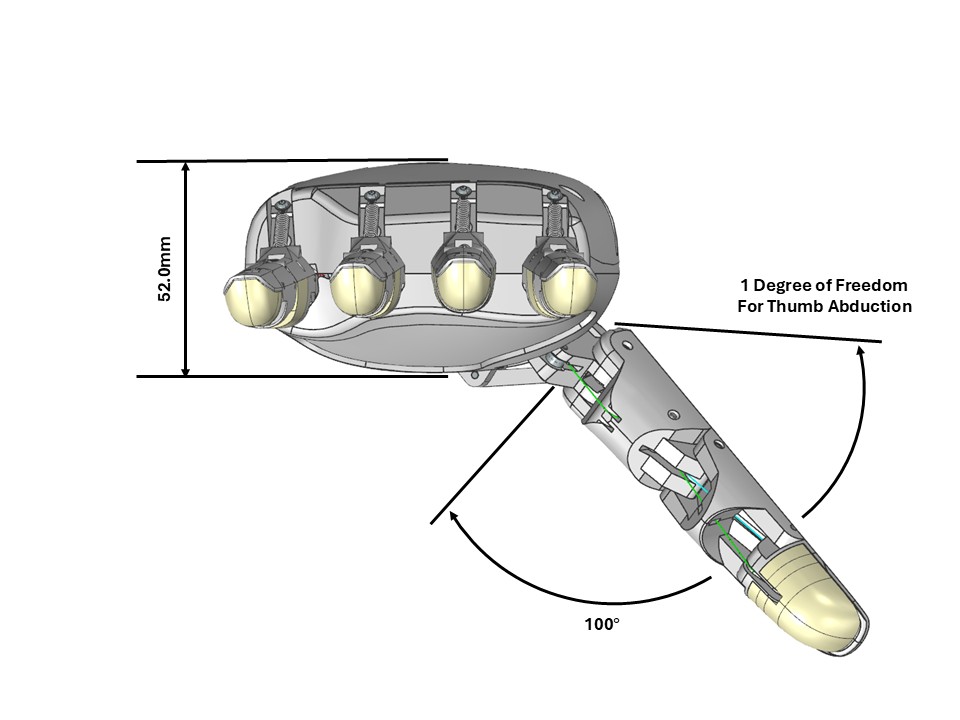
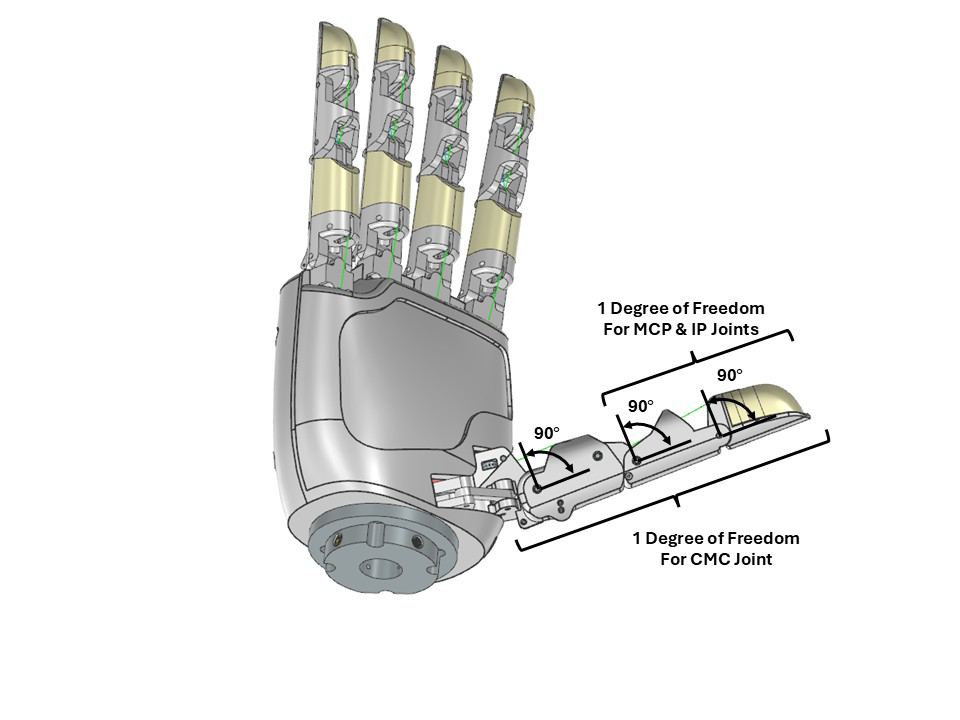
Thumb (3 DoF)
- Abduction / adduction – thumb swings in and out of the palm
- Base flexion – thumb moves across the palm
- Thumb curl – tip of the thumb closes for grasping
-
Fingers (4 DoF)
- Index finger flexion
- Middle finger flexion
- Ring finger flexion
- Pinky finger flexion
Internally, these map to 16 joints (including passive joints) to produce human‑like curling and grasp shapes, but only 7 channels need to be commanded.
Typical motion ranges
Approximate visible motion ranges:
- Finger flexion (index / middle / ring / pinky): up to 90° (from straight to curled)
- Thumb abduction: 0°–100° (from inline with the palm to fully spread)
- Thumb CMC flexion: about 55° across the palm
- Thumb curl (proximal + distal): about 90° toward the palm
These ranges allow the hand to perform pinch, tripod, cylindrical/power, and hook grasps.
4. Mounting Interface
The wrist side of the palm provides a flat mounting surface with threaded inserts for attaching to robot wrists and adapters.
- Mounting surface: flat circular/oval pad at the wrist
- Fasteners: four M3 threaded inserts accessible from the outside
- Usage: mount directly to your robot flange, or to an intermediate adapter plate
Exact hole spacing and coordinate frames are available in the open CAD:
5. Ports, Power & Electronics Access
All electronics are inside the palm; externally, you only interact with a small set of ports.
Power
- Input voltage: 6 V DC
- Max current: 8 A (for all 7 servos)
- Typical supply: bench supply or robot power bus with appropriate 6 V regulation
The exact connector form factor may vary between board revisions (XT‑style or equivalent). See the PCB / electronics documentation for pinout and wiring examples.
Data / Communication
-
On‑board MCU: ESP32‑S3
-
Interface: USB 2.0, single cable to your host
-
Usage:
- Commanding actuator targets (positions/velocities)
- Reading feedback (positions, currents, temperatures, status)
- Firmware updates and configuration
USB appears as a standard serial device on the host; the GUI and SDK connect to this port directly.
6. Hand Features (At a Glance)
-
Compact & lightweight
- Sub‑400 g with a 198 mm length makes it suitable for desktop arms and mobile platforms.
-
Human‑like motion
- 5 fingers, 16 joints, and 7 actuated DoF provide natural curling and thumb opposition.
-
Clean external interface
- Flat wrist mounting pad with M3 inserts
- Single USB data link + 6 V power rail
-
Consistent actuator API
- Fixed 7‑channel layout for all units
- Normalized
[0.0, 1.0]command range for easy integration into controllers and RL policies.